TAMARIW
Selbstmontage und Rekonfiguration im Weltraum, Wartung und Betankung im Orbit, um die Lebensdauer oder Funktionalität von Satelliten in der Nähe zu verlängern, sowie die Entfernung von Trümmern und ausgemusterten Elementen sind Beispiele für zukünftige Weltraummissionen, die Weltraumobjekte erfordern, die autonome Rendezvous- und Andockmanöver mit anderen Elementen im Orbit durchführen können. Dies erfordert ein zuverlässiges, autonomes Andocksystem, das einen sicheren Andockvorgang garantiert und mit einem vereinfachten Design eine einfache Integration in die Satelliten ermöglicht.
Im Rahmen des Projekts TAMARIW werden zwei baugleiche 3U CubeSats mit autonomen Andocksystemen entwickelt, um mehrere Abdock-/Andockmanöver im Weltraum in vordefinierten relativen Abständen durchzuführen. Sobald die beiden Satelliten angedockt sind, soll die resultierende Struktur des 6U-CubeSats in der Lage sein, sich als eine Einheit zu bewegen und zu drehen. Darüber hinaus wird die Standardisierung und Teilautonomie der Satellitenmodule getestet. Im Falle eines Ausfalls, der in einem Satelliten festgestellt wird, kann ein Wiederherstellungs- und Übernahmeprotokoll initiiert werden. Bei diesem Protokoll kann der andere Satellit Befehle an die Aktuatoren senden und Sensorinformationen direkt vom wiederhergestellten Satelliten über eine drahtlose Verbindung empfangen. Auf diese Weise wird es möglich sein, die Ausrichtung zu ändern, die Umlaufbahn anzupassen, die Software zu aktualisieren oder sogar End-of-Life-Manöver an einem außer Betrieb genommenen Satelliten durchzuführen.

Die Entwicklung eines autonomen Andocksystems für Kleinsatelliten, das einen sicheren automatisierten Andockprozess gewährleisten kann, ist eine große Herausforderung. Kleine Satelliten haben strenge Beschränkungen in Bezug auf Masse und Volumen, was zu einer begrenzten Leistung und Manövrierfähigkeit führt. Außerdem schränkt das begrenzte Volumen den Einsatz komplexer Mechanismen oder fortschrittlicher Leitsensorsysteme für das Andock- und Anlegevorgänge ein. Darüber hinaus wären herkömmliche Satellitenantriebe für die erforderlichen Nahbereichsmanöver während des Anflugs und Andockens sehr schwer zu verwenden.
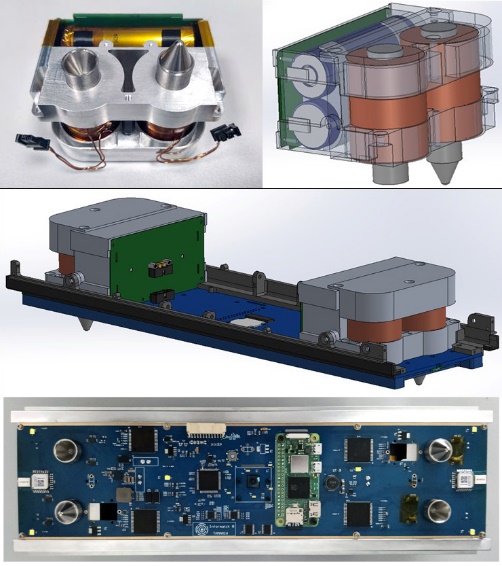
Das in TAMARIW entwickelte autonome Andocksystem soll diese Probleme lösen. Das System besteht hauptsächlich aus elektromagnetischen Docking-Einheiten und einem Onboard-Guidance- und Docking-Control-Subsystem mit mehrstufigen Guidance-Sensorsystemen, um das Risiko von Ausfällen oder Bedienungsfehlern zu minimieren.
Die Satelliten sollen bis Ende des ersten Quartals 2026 im angedockten Zustand als einzelner 6U CubeSat gestartet werden. Das Projekt wird vom Lehrstuhl für Informationstechnik für Luft- und Raumfahrt der Universität Würzburg und dem Zentrum für Telematik e.V. in Würzburg entwickelt und von der Raumfahrtagentur des Deutschen Zentrums für Luft- und Raumfahrt (DLR) mit Bundesmitteln des Bundesministeriums für Wirtschaft und Technologie (BMWi) gefördert.
Kontakt:
Atheel Redah atheel.redah@uni-wuerzburg.de
Saurav Paudel saurav.paudel@uni-wuerzburg.de
Felix Sittner felix.sittner@uni-wuerzburg.de
Sergio Montenegro sergio.montenegro@uni-wuerzburg.de