TAMARIW
Applications such as self-assembly and reconfiguration in space, on-orbit servicing and refueling to extend the life or functionalities of nearby satellites, debris and retired elements removal are examples of future space missions that will require space objects that can perform autonomous rendezvous and docking maneuvers with other orbiting elements. This will require a reliable autonomous docking system that can guarantee a safe docking process and with simplified design to be able to integrate it into the satellites easily.
The TAMARIW project is intended to develop two identical 3U CubeSats with autonomous docking systems to perform several undocking/docking maneuvers in space at predefined relative distances. Once the two satellites are in docked state, the resulting structure of 6U CubeSat should have the ability to move and rotate as a single unit. In addition, the standardization and partial autonomy of the satellite modules will be tested. In case of a failure detected in one satellite, a Recovery and Takeover Protocol can be initiated. In this protocol, the other satellite can send commands to the actuators and receive sensors information directly from the recovered satellite over wireless connection. Thus, it will be possible to change the orientation, adjust the orbit, upgrade the software, or even perform an end-of-life maneuver to an out of service satellite.

Developing an autonomous docking system for small satellites that can guarantee safe automated docking process is very challenging. Small satellites have strict limitations in mass and volume which result in limited power and maneuvering capability. Also, the limited volume restricts the use of complex mechanisms or advanced guidance sensor systems for berthing and docking operations. In addition, conventional satellite propulsion systems would be very difficult to use for close proximity maneuvers during approach and docking.
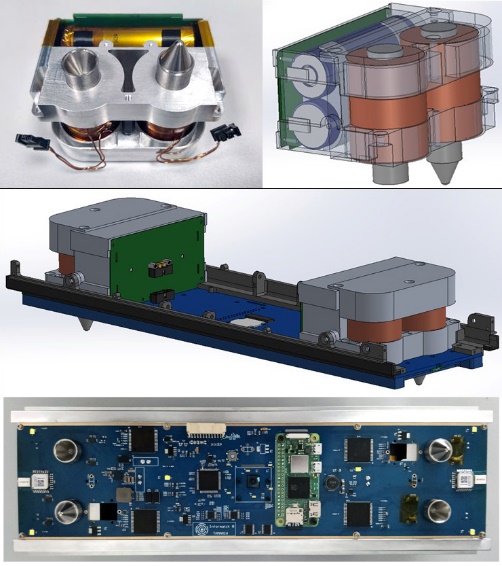
The autonomous docking system developed in TAMARIW is designed to overcome these problems. The system consists mainly of Electromagnetic Docking Units and onboard Guidance and Docking Control subsystem with multistage guidance sensor systems to minimize the risk of failure or operational error.
The satellites are scheduled to be launched in the first quarter of 2027 in a docked state as a single 6U CubeSat. The project is developed by the chair of Aerospace Information Technology at the University of Würzburg and the Zentrum für Telematik e.V. in Würzburg and is funded by the Space Agency of the German Aerospace Center (DLR) with federal funds of the German Federal Ministry of Economics and Technology (BMWi).
Contact:
Atheel Redah atheel.redah@uni-wuerzburg.de
Saurav Paudel saurav.paudel@uni-wuerzburg.de
Felix Sittner felix.sittner@uni-wuerzburg.de
Sergio Montenegro sergio.montenegro@uni-wuerzburg.de