




Projects
ElRobot
Development of an automated and modular electrician's robot for creating precise cable channels for electrical installations based on DIN 18015

MultiUWS
We intend to develop a novel approach for geometric reconstruction based on implicit neural representations. In particular, AI-based algorithms are to be developed to increase the resolution of depth images and fill gaps in individual scans

DigitalPV
Through the «digitalPV» network, 15 partners from industry and academia are collaborating to develop innovative solutions to these challenges. The project is funded by the Federal Ministry for Economic Affairs and Climate Action.
Robotics - test yourself!
Automated tool that enables students to independently identify key focus areas within their robotics study program.

Introduction to ROS
ROS is increasingly recognized as an industry standard in robotics, particularly in areas such as autonomous vehicles, logistics robots, and service robots.
")
3D 6DOF Printing
A MEW-capable print head is to be adapted to a 6-axis robot, thus extending the printing process from 3 degrees of freedom (DoF) to 5/6 DoF in order to be able to produce complex structures, for example organs or workpieces without planar surfaces.

Ein-Klick-Robi
The overall objective of this partner project is to investigate and develop methods for intelligent optical sensor data processing for the central robotic deburring of engine bearing rings.
3DTK Toolkit
The 3D Toolkit provides algorithms and methods to process 3D point clouds.

goRoborock
Robotische Exploration der Mondoberfläche und schritthaltende geologische Analysen in 3D

Roborizon
Robotische Lösung für Sicherheitsforschung
TeleLab
Tele-Experiments with mobile robots

WISP
In the project, a functioning non-contact, non-destructive and operationally condition-independent inspection technology for wind turbines as well as their rotor blades is to be developed.

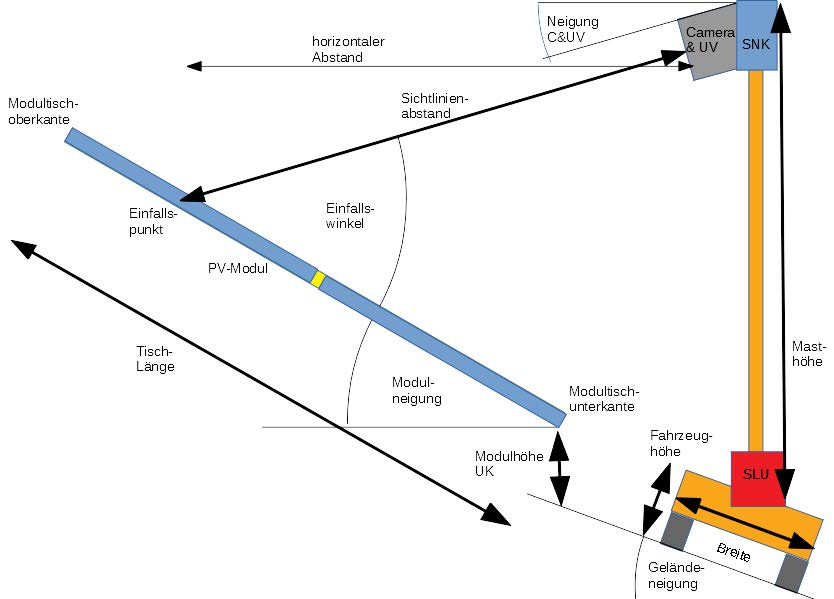
RobInspec
In the RobInspec project, the partners aim to develop a ground-based mobile system for the autonomous optical inspection of photovoltaic open-space installations
Past Projects
Deals3D
Data from a sensor network of different mapping sensors as well as as-built data from previous surveys are automatically merged and interpreted into a common, highly accurate three-dimensional map

Launch3D
For many archaeological sites, there is a need for precise digitization in order to preserve the sensitive cultural assets and make them accessible to a wider public. The LAUNCH-3D project will focus on the digitization of underwater archaeological sites.

RPS-Exact
Development and integration of a camera-based solution to improve the accuracy of irradiation in radiotherapy.

Amadee 24
The AMADEE-24 challenge is a Mars-simulation conducted in Armenia by the Austrian space forum.

Underwater VR for astronaut training
We plan in this study to combine diving goggles with a VR head set and to use our small 40 cubic meter pool for simulating a space environment

DigSmart
The aim of the DigSmart project is to establish digitization along the value chain in civil engineering, from planning to documentation, end-to-end and across the entire technically available breadth of organizational and technical data.


3D Raumlaser
In this project we investigated a novel approach for a position verification system in medical applications.

Sauber3D
We develop a fully automated solution for deburring injection molded plastic parts.

UWSensor
In this project, the consortium is researching and developing the technologies needed to enable a new generation of underwater sensors.

DAEDALUS
The DAEDALUS mission concept aims at exploring and characterizing the entrance and initial part of Lunar lava tubes within a compact, tightly integrated spherical robotic device, with a complementary payload set and autonomous capabilities.

MUSCHEL-3D
A developed functional prototype will be tested in real application scenarios for the documentation of archaeological sites in water and the recording of technical structures such as locks, sheet pile walls or harbor wall.

TASTSINN-VR
Tactile sensor data glove for training and tele-operation of mining and underwater robots with supporting virtual reality.

AutoPV
Use an autonomous six-wheeled robot to inspect solar panels from below with an infrared camera to find damaged cells and connectors, while at the same time performing robotic mowing.

